研究紹介
モデルベース開発
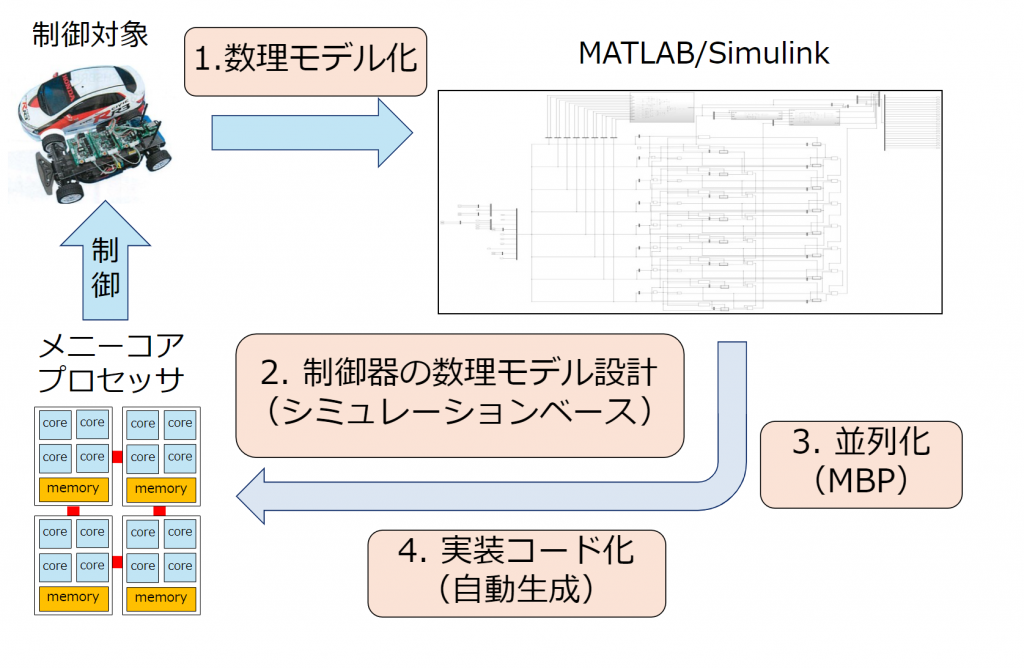
モデルベース開発とは、ブロックから構成されるモデルで開発する手法でシミュレーション技術を取り入れています。 従来の開発手法はハードウェアへの依存度が高く、開発の後半の検証段階で失敗するとハードウェアの追加コストと設計段階まで戻り再設計するためのコストが膨大になります。 モデルベース開発は従来の開発手法とは異なり、設計段階で検証が可能です。そのため出戻りが少なく全体として開発工数/コストの削減につながります。
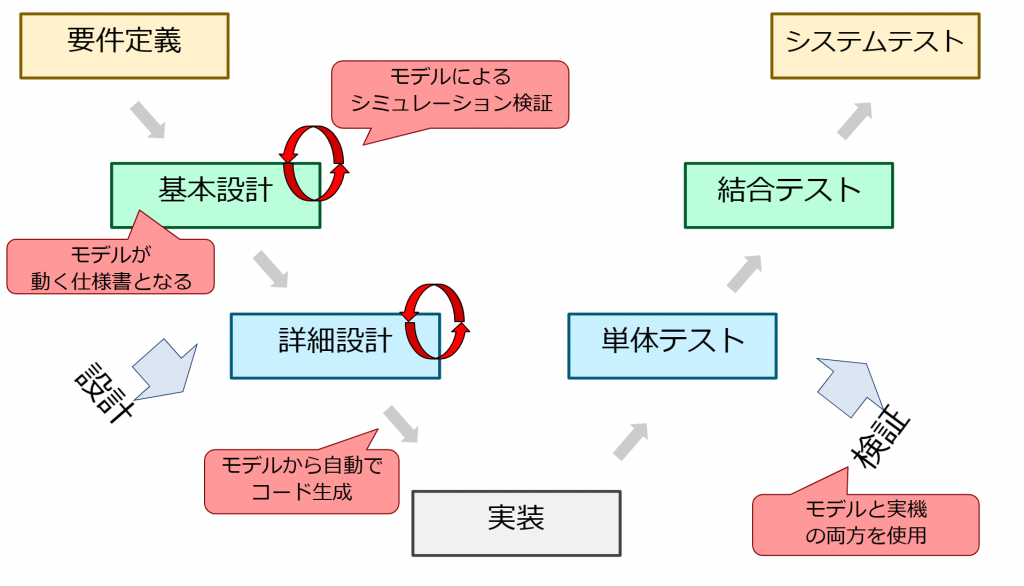
モデルベース開発の特徴の特徴を挙げます。 利点としては設計段階で網羅的検証が可能であること、モデルを再利用可能であること、システムの構造が可視化され理解しやすいことなどが挙げられます。 一方、欠点としては設計段階の工数増加することや人材育成の時間が必要であることなどが挙げられます。 近年の自動車産業では、システムの複雑化や安全性の観点から様々な状況を想定、大量の検証テストが必要であることからモデルベース開発が採用されつつあります。
MATLAB/Simulink
MATLAB/SimulinkはMathWorks社によって提供されるソフトウェアで、モデルベース開発のデファクトスタンダードとなっています。 MATLABとは数値解析ソフトウェア・その中で使うプログラミング言語の名称で、従来のプログラミング言語より短時間で科学技術計算を行うことが可能です。 Simulinkとはモデルベースデザインのためのブロック線図環境で、組み込みシステムのシミュレーション、自動コード生成が可能です。
Model-Based Parallelizer (MBP)
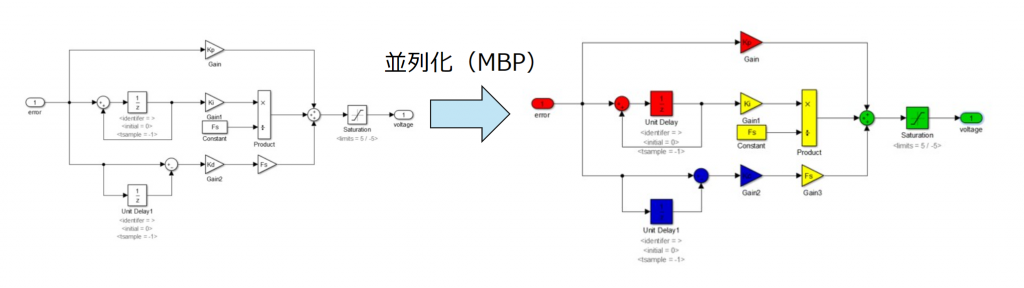
MBPとはハードウェアを抽象化した記述(SHIM)、モデル情報,Simulinkモデルから自動生成されたCコードを入力としてグラフカットを用いた並列化(処理分散)を実行、マルチコア上で動かす並列Cコードを生成できます。MBPによってハードウェアを意識しないソフトウェア設計が可能になり、開発の生産性が大きく向上します。
共同研究・自動運転
本プロジェクトでは,名古屋大学,九州大学,慶応大学,立命館大学などと共同でCS005と呼ばれる共同研究室を立ち上げ,共同研究やワークショップなども実施しています.前述したとおり,CPSは多岐に渡る様々な分野の知識が必要となります.そのため,単独の研究室ではそれらの知識をカバー出来ないといった理由から,Computer Scienceにおいて重要となる以下の5つのドメインの協調を目的とするということでCS005と名付けられました.
| Embedded Systems |  |
| Operating Systems | |
| Programming Languages | |
| High-Performance Computing | |
| Computer Architecture |
最近では,自動車の自動運転についてもCS005を通して我々も携わっており,実際にトヨタ社のプリウスを用いた研究も進めています.
CS005によって異分野の共同研究の輪を広げ、世界に通用する研究へ

Robot Operating System(ROS)
自動運転にはRobot Operating System(以下、ROS)と呼ばれるメタ・オペレーティングシステムが主に利用されています。 ハードウェア抽象化、低レベルなデバイス制御、一般的な機能性、プロセス間通信、そして、パッケージ管理など、一般的なオペレーティングシステムに要求されるサービスを提供します。 また、コードを複数台のコンピュータにわたって保持・ビルド・記述・実行するためのツールやライブラリも提供しています。 ROSはロボット分野で培った豊富なライブラリが提供されており、自動運転のプラットフォームにおいてデファクトスタンダードとなっています。

オープンソースソフトウェア自動運転システム:Autoware
AutowareはLinuxとROSをベースとした自動運転システム用オープンソースソフトウェアです。 名古屋大学が中心となって開発しており、 自動運転の研究開発用途に無償で公開しています。 本研究室でも名古屋大学やその他の企業とAutowareの開発を共同で行っています。 レーザレーダ、カメラ、GNSSなどの環境センサを利用して、自車位置や周囲物体を認識しながら、カーナビから与えられたルート上を自律走行できます。
本プロジェクトのデモ走行の様子
本プロジェクトの成果を活用したセミナー
ROSは自動運転においてデファクトスタンダードになっていますが、Linux上での動作しか保証していません。さらに、リアルタイム性を保証していません。 そのため、現状ではシステム動作が間に合わず事故が発生する危険性があり、自動運転に利用するための弊害になっています。 そこで研究室では、ROSの通信同期機構や、自動運転向けのスケジューリング、リアルタイムOS上での動作などの研究を行っています。
CPS関係の研究
CPSでは大量の実世界データを扱うために、高度な計算資源が必要となります。その解決として私たちは、GPUを用いることを提案しています。GPUは、大量のプロセッサコアを搭載しており、そのコアを用いて高速な計算を行うことができ、さらに、近年ではグラフィックにかぎらず汎用的な計算できるため、とてもホットなトピックとなっています。しかし、まだまだ、GPUをCPSに適用するには課題が多く存在しており、その課題の解決を目的としています。
GPUのスケジューリング
CPSで必要な計算をGPUで効率的に利用するには、GPUのスケジューリング理論を考える必要があります。
Gdev:CUDA実行環境のオープンソース実装
我々の研究の最も基盤となっているのがGdevです。Gdevは、現在、GPUの有名なベンダーにはNVIDIAがあります。このNVIDIAは、GPUをグラフィック以外の汎用的な処理に利用するためにCUDAと呼ばれるプラットフォームを提供しています。このCUDAはその内部構造が全て非公開であり、オープンソースで実装することで、その処理基盤の研究が可能にし、これによって今後の研究への発展を目指しています。https://github.com/CS005/gdev
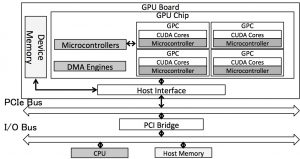
GPUマイコンを用いたGPGPU環境における資源管理
GPUにはオンチップにマイクロコントローラが搭載されています。私たちはこのマイクロコントローラを制御し、今までの組込みシステムで培った知識を用いてGPU資源の管理を行い、CPSに適したGPU処理を可能とするGPGPU環境の構築を目指しています。具体的には、PC側で行うGPUの制御処理を、GPUチップに搭載されるマイクロコントローラにオフロードすることで、GPU自身が制御を行うようになります。これによって、効率的なGPU処理が可能になると考えています。
Ghost GPU: 仮想GPUフレームワークの構築
近年では、スマートフォンの普及は著しく、ウェアラブル・コンピュータなども登場してきました。それらモバイル端末を利用し、環境認識、つまり画像認識などを行うことも増えてきました。しかし、モバイル端末には多くの計算資源がなく、多くの計算資源を要する画像認識といったCPSアプリケーションを動作させることは困難です。そこで、本研究ではスマートフォンやウェアラブルコンピュータなどのモバイル端末において、外部のGPUの計算資源を利用するを可能とするフレームワークを構築します。

自動運転ソフトウェアとMATLAB/Simulinkの連携
一般道自動運転向けオープンソースソフトウェアであるAutowareとMATLAB/Simulinkの連携を行っている。 Autowareは、位置推定、物体認識、経路計画、軌道生成など自動運転システムで必要な機能を提供している。 Autowareのそれぞれの機能はROS(Robot Operating System)のノードとして実装されており、ROSノードとMATLAB/Simulinkのインタフェースを提供するRobotics System Toolbox™を用いることで、MATLAB/Simulinkで作成されたモデルがAutowareと接続可能になる。 Autowareでは実証実験等で得た実データを用いたシミュレーションが可能である。 連携機能を用いることで、MATLAB/Simulinkのモデルに対しても自動運転の実データを用いたシミュレーションが可能になる。 コシュミレーションの様子は下記の動画を参照してください。
自動運転ソフトウェアとMATLAB/Simulinkの連携
自動車・自動運転研究成果
論文誌
- Atsushi Yano and Takuya Azumi, “Deadline Miss Early Detection Method for Mixed Timer-Driven and Event-Driven DAG Tasks,” IEEE ACCESS, Vol.11, pp.22187-22200, 2023.
- Atsushi Yano, Shingo Igarashi, and Takuya Azumi, “LET Paradigm Scheduling Algorithm Considering Parallel Processing on Clustered Many-core Processor,” IPSJ Journal of Information Processing, Vol.30, pp.646-658, 2022.
- Atsushi Yano and Takuya Azumi, “CQGA-HEFT: Q-learning-based DAG Scheduling Algorithm Using Genetic Algorithm in Clustered Many-core Platform,” IPSJ Journal of Information Processing, Vol.30, pp.659-668, 2022.
- Zihang Li, Atsushi Hasegawa, and Takuya Azumi, “Autoware_Perf: A tracing and performance analysis framework for ROS 2 applications,” Journal of Systems Architecture, Vol. 123, 2022.
- Yutaro Kobayashi, Kentaro Honda, Sasuga Kojima, Hiroshi Fujimoto, Masato Edahiro, and Takuya Azumi, “Mapping Method Usable with Clustered Many-core Platforms for Simulink Model,” IPSJ Journal of Information Processing, Vol.30, pp.141–150, 2022.
- Shingo Igarashi, Takuro Fukunaga, and Takuya Azumi, “Accurate Contention-aware Scheduling Method on Clustered Many-core Platform,” IPSJ Journal of Information Processing, 2021.
- Keita Miura, Shota Tokunaga, Yuki Horita, Yasuhiro Oda, and Takuya Azumi, “CoSAM: Co-Simulation Framework for ROS-based Self-driving Systems and MATLAB/Simulink,” IPSJ Journal of Information Processing, 2021.
- Yuhei Suzuki, Yusuke Fujii, Takuya Azumi, Nobuhiko Nishio, Shinpei Kato,“Real-Time GPU Resource Management with Loadable Kernel Modules”, IEEE Transactions on Parallel and Distributed Systems (TPDS), 2017.
- Yuki Iida, Yusuke Fujii, Takuya Azumi, Nobuhiko Nishio, and Shinpei Kato, “GPUrpc: Exploring Transparent Access to Remote GPUs,” ACM Transactions on Embedded Computing Systems (TECS) , vol. 16, no. 17, pp. 1-25, October 2016. DOI:10.1145/2950056
- 藤居 祐輔, 安積 卓也, 西尾 信彦, 加藤 真平, “GPU オンチップマイクロコントローラへのデータ転送処理オフロード,” 情報処理学会論文誌 組込みシステム特集号, Vo.55, No.2 ,pp.1048 – 1058, 2014.
国際会議
- Tomoya Kobayashi and Takuya Azumi, “Work-in-Progress: Federated and Bundled-based DAG Scheduling,” In Proceedings of the 44th IEEE Real-Time Systems Symposium (RTSS-2023), Taipei, Taiwan, 6 December, 2023.
- Takumi Onozawa, Hiroshi Fujimoto, and Takuya Azumi, “Model-based Development for ROS 2-based Autonomous-driving Software,” In Proceedings of the 21st IEEE International Conference on Embedded and Ubiquitous Computing (EUC-2023), Exeter, UK, 3 November, 2023.
- Yuta Tajima, Tatsuya Miki, and Takuya Azumi, “Performance Evaluation Framework for Arbitrary Nodes of Autonomous-driving Systems,” In Proceedings of the 21st IEEE International Conference on Embedded and Ubiquitous Computing (EUC-2023), Exeter, UK, 3 November, 2023.
- Yutaro Nozaki and Takuya Azumi, “DAG Scheduling for Clustered Many-core Processor Considering Execution-time-reduction Effectiveness,” In Proceedings of The 27th International Symposium on Distributed Simulation and Real Time Applications (DS-RT 2023), Slim Barracks Rise, Singapore, 4-5 October, 2023.
- Xuankeng He, Hiromi Sato, Yoshikazu Okumura, and Takuya Azumi, “TILDE: Topic-tracking Infrastructure for Dynamic Message Latency and Deadline Evaluator for ROS 2 Application,” In Proceedings of The 27th International Symposium on Distributed Simulation and Real Time Applications (DS-RT 2023), Slim Barracks Rise, Singapore, 4-5 October, 2023.
- Daichi Yamazaki and Takuya Azumi, “Estimation of Deadline Miss Rate for DAG Mixed Timer-driven and Event-driven Nodes,” In Proceedings of The 27th International Symposium on Distributed Simulation and Real Time Applications (DS-RT 2023), Slim Barracks Rise, Singapore, 4-5 October, 2023.
- Atsushi Yano and Takuya Azumi, “RD-Gen: Random DAG Generator Considering Multi-rate Applications for Reproducible Scheduling Evaluation,” In Proceedings of the 26th IEEE International Symposium On Real-time Distributed Computing (ISORC 2023), Nashville, Tennessee, USA, 23-25 May 2023.
- Bo Peng, Atsushi Hasegawa, and Takuya Azumi, “Scheduling Performance Evaluation Framework for ROS 2 Applications,” In Proceedings of the 18th IEEE International Conference on Embedded Software and Systems (ICESS), Chegdu, China, 18-21 Dec. 2022.
- Takahisa Kuboichi, Atsushi Hasegawa, Bo Peng, Keita Miura, Kenji Funaoka, Shinpei Kato, and Takuya Azumi, “CARET: Chain-Aware ROS 2 Evaluation Tool,” In Proceedings of the 20th IEEE International Conference of Embedded and Ubiquitous Computing (EUC 2022), Wuhan, China, 9-11 Dec. 2022.
- Daichi Yamazaki and Takuya Azumi, “Chain-Aware Scheduling for Mixed Timer-Driven and Event-Driven DAG Tasks,” In Proceedings of the Asia Pacific Conference on Robot IoT System Development and Platform (APRIS 2022), Tokyo, Japan, 1-2 Nov. 2022.
- Ryo Okamura and Takuya Azumi, “DAG Scheduling Considering Parallel Execution for High-Load Processing on Clustered Many-Core Processors,” In Proceedings of the 26th IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications (DS-RT 2022), Alès, France, Sep. 2022.
- Yutaro Kobayashi, Hiroshi Fujimoto, and Takuya Azumi, “Communication Overhead Schema Independent of Libraries for Software/Hardware Interface,” In Proceedings of the 21st International Conference on Intelligent Software Methodologies, Tools, and Techniques (SOMET 2022), Kita-Kyushu, Japan, 20-22 Sep, 2022.
- Takumi Onozawa and Takuya Azumi, “Self-driving Software Benchmark for Model-based Development,” In Proceedings of the 21st International Conference on Intelligent Software Methodologies, Tools, and Techniques (SOMET 2022), Kita-Kyushu, Japan, 20-22 Sep, 2022.
- Takuma Yabe and Takuya Azumi, “Exploring the Performance of Deep Neural Networks
on Embedded Many-Core Processors,” In Proceedings of the 13th ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS 2022), online, 4-6 May, 2022. - Atsushi Yano and Takuya Azumi, “Work In Progress: Reinforcement Learning-based DAG Scheduling Algorithm in Clustered Many-Core Platform,” WiP session of the 42th IEEE Real-Time Systems Symposium (RTSS 2021), online, 2021.
- Zihang Li, Atsushi Hasegawa, and Takuya Azumi, “Autoware_Perf: A Tracing and Performance Analysis Framework for ROS 2 Applications” In Proceedings of the 17th International Conference on Embedded Software and Systems (ICESS 2021), online, 13-14 Dec, 2021.
- Bo Peng, Yuqing Yang, Yoshikazu Okumura, Atsushi Hasegawa, and Takuya Azumi, “ThreadedCallback: Improving Real-time Performance of ROS 2” In Proceedings of the Asia Pacific Conference on Robot IoT System Development and Platform (APRIS 2021), online, 29-30 Nov, 2021.
- Shuhei Tsunoda, and Takuya Azumi, “ROS 2 Framework for Embedded Multi-core Platform” In Proceedings of the Asia Pacific Conference on Robot IoT System Development and Platform (APRIS 2021), online, 29-30 Nov, 2021.
- Takuma Yabe, Yuto Koyanagi, Keita Miura, and Takuya Azumi, “Self-driving Simulator Test Scenario Framework with Event-triggered Functionality” In Proceedings of the Asia Pacific Conference on Robot IoT System Development and Platform (APRIS 2021), online, 29-30 Nov, 2021.
- Tatsuya Miki and Takuya Azumi, “Porting Evaluation Framework for Self-Driving Software Based on ROS 2” In Proceedings of the Asia Pacific Conference on Robot IoT System Development and Platform (APRIS 2021), online, 29-30 Nov, 2021.
- Yutaro Kobayashi, Hiroshi Fujimoto, and Takuya Azumi, “Performance Estimation for Embedded Many-core Processor with Software/Hardware Performance Description” In Proceedings of the Asia Pacific Conference on Robot IoT System Development and Platform (APRIS 2021), online, 29-30 Nov, 2021.
- Atsushi Yano, Shingo Igarashi, and Takuya Azumi, “Contention-Free Scheduling Algorithm Using LET Paradigm for Clustered Many-core Processor” In Proceedings of the 25th IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications (DS-RT 2021), Valencia, Spain, Sep. 2021.
- Ryotaro Koike and Takuya Azumi, “Federated Scheduling in Clustered Many-core Processors” In Proceedings of the 25th IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications (DS-RT 2021), Valencia, Spain, Sep. 2021.
- Kentaro Honda, Hiroshi Fujimoto, and Takuya Azumi, “Estimation Method Considering OS Overheads for Embedded Many-Core Platform,” In Proceedings of the 18th IEEE International Conference on Embedded and Ubiquitous Computing (EUC 2020), Guangzhou, China, Dec. 2020.
- Keita Miura and Takuya Azumi, “Converting Driving Scenario Framework for Testing Self-Driving Systems,” In Proceedings of the18th IEEE International Conference on Embedded and Ubiquitous Computing (EUC 2020), Guangzhou, China, Dec. 2020.
- Ryotaro Koike, Takuro Fukunaga, Shingo Igarashi, and Takuya Azumi, “Contention-Free Scheduling for Clustered Many-Core Platform,” In Proceedings of 16th IEEE International Conference on Embedded Software and Systems (ICESS 2020), Shanghai, P. R. China, Dec. 2020.
- Yuqing Yang and Takuya Azumi, “Exploring Real-Time Executor on ROS 2,” In Proceedings of 16th IEEE International Conference on Embedded Software and Systems (ICESS 2020), Shanghai, P. R. China, Dec. 2020.
- Ryo Yoshinaka and Takuya Azumi, “Model-Based Development Considering Self-Driving Systems for Many-Core Processors,” In Proceedings of the 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2020), Vienna, Austria, Sep. 2020.
- Shingo Igarashi, Tasuku Ishigooka, Tatsuya Horiguchi, Ryotaro Koike, and Takuya Azumi, “Heuristic Contention-Free Scheduling Algorithm for Multi-core Processor using LET Model,” In Proceedings of the 24th IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications (DS-RT 2020), Prague, Czech Republic, Sep. 2020.
- Shingo Igarashi, Yuto Kitagawa, Takuro Fukunaga, and Takuya Azumi, “Accurate Contention Estimate Scheduling Method Using Multiple Clusters of Many-core Platform for Applications Requiring Parallel Computations,” In Proceedings of the 28th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP 2020), Västerås, Sweden, Mar. 2020.
- Kentaro Honda, Sasuga Kojima, Hiroshi Fujimoto, Masato Edahiro, and Takuya Azumi, “Mapping Method of MATLAB/Simulink Model for Embedded Many-Core Platform,” In Proceedings of the 28th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP 2020), Västerås, Sweden, Mar. 2020. .
- Shingo Igarashi and Takuya Azumi, “Work In Progress: Considering Heuristic Schedulingfor NoC-based Clustered Many-core Processor Using LET Model,” WiP session of the 40th IEEE Real-Time Systems Symposium (RTSS2019), Hong Kong, 2019
- Keita Miura, Shota Tokunaga, Noriyuki Ota, Yoshiharu Tange and Takuya Azumi, “Autoware Toolbox: MATLAB/Simulink Benchmark Suite for ROS-based Self-driving Software Platform,” In Proceedings of the 30th International Workshop on Rapid System Prototyping (RSP), New York, USA, Oct. 2019.
- Shingo Igarashi, Yuto Kitagawa, Tasuku Ishigooka, Tatsuya Horiguchi, and Takuya Azumi,“Multi-rate DAG Scheduling Considering Communication Contention for NoC-based Embedded Many-core Processor,” In Proceedings of the 23rd International Symposium on Distributed Simulation and Real Time Applications (DS-RT2019), Cosenza, Italy, Oct. 2019. (Best Paper Runner-up Award)
- Kentaro Honda and Takuya Azumi, “Performance Estimation for Many-core Processor in Model-Based Development,” In Proceedings of the 8th Mediterranean Conference on Embedded Computing (MECO2019), Montenegro, pp.144-149, Jun. 2019.
- Hiroyuki Chishiro, Kazutoshi Suito, Tsutomu Ito, Seiya Maeda, Takuya Azumi, Kenji Funaoka, and Shinpei Kato, “System on a Chip and Software Platforms for Fully Autonomous Driving,” In Proceedings of the IEEE 15th International Conference on Embedded Software and Systems (ICESS2019), Nevada, USA, Jun. 2019.
- Shota Tokunaga, Keita Miura, and Takuya Azumi, “Autoware Toolbox: MATLAB/Simlink Benchmark Suite for ROS-based Self-driving Software Platform”, In Proceedings of the 21st IEEE International Symposium on Real-time Computing (ISORC 2019), Valencia, Spain, May 2019.
- Daisuke Fukutomi, Takuya Azumi, Shinpei Kato, and Nobuhiko Nishio, “Resource Manager for Scalable Performance in ROS Distributed Environments,” Design, Automation and Test in Europe (DATE 2019), Florence, Italy, Mar. 2019.
- Shota Tokunaga, Yuki Horita, Yasuhiro Oda and Takuya Azumi, “IDF-Autoware: Integrated Development Framework for ROS-based Self-driving Systems Using MATLAB/Simulink,” In Proceedings of the Workshop of Autonomous Systems Design (ASD2019), Florence, Italy, Mar. 2019.
- Yuto Kitagawa, Tasuku Ishigooka, and Takuya Azumi, “DAG Scheduling Algorithm for a Cluster-Based Many-Core Architecture,” In Proceedings of the 16th IEEE International Conference on Embedded and Ubiquitous Computing (EUC 2018), Bucharest, Romania, Oct. 2018.
- Yukihiro Saito, Futoshi Sato, Takuya Azumi, Shinpei Kato and Nobuhiko Nishio, “ROSCH: Real-Time Scheduling Framework for ROS”, In Proceedings of the 24th IEEE International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA 2018), Hakodate, Japan, Aug. 2018.
- Yuto Kitagawa and Takuya Azumi,“DAG Scheduling Algorithm Considering Large-scale calculation Tasks Using Many-core Architecture”, the 9th International Real-Time Scheduling Open Problems Seminar (RTSOPS 2018), Barcelona, Spain, Jul. 2018.
- Yuhei Suzuki, Takuya Azumi, Shinpei Kato, and Nobuhiko Nishio, “Real-Time ROS Extension on Transparent CPU/GPU Coordination Mechanism,” In Proceedings of the 21st IEEE International Symposium on Real-time Computing (ISORC 2018), Singapore, May 2018.
- Hiroki Hayakawa, Takuya Azumi, Akinori Sakaguchi, Toshimitsu Ushio, “ROS-based Support System for Supervision of Multiple UAVs by a Single Operator ,” In Proceeding of 9th IEEE International Conference on Cyber-Physical Systems, vol. ICCPS 2018, no. 0, pp. Porto, April 2018.
- Shinpei Kato, Shota Tokunaga, Yuya Maruyama, Seiya Maeda, Manato Hirabayashi, Yuki Kitsukawa, Abraham Monrroy, Tomohito Ando, Yusuke Fujii, and Takuya Azumi, “Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems,” In Proceedings of the 9th ACM/IEEE International Conference on Cyber-Physical Systems, vol. ICCPS2018, pp. Porto, April 2018.
- Yukihiro Saito, Futoshi Sato, Takuya Azumi, Shinpei Kato and Nobuhiko Nishio, “ROSCH: Real-Time Scheduling Framework for ROS”, In Proceedings of the 24th IEEE International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA 2018), Hakodate, Japan, Aug. 2018. (accepted)
- Yuto Kitagawa and Takuya Azumi,“DAG Scheduling Algorithm Considering Large-scalecalculation Tasks Using Many-core Architecture”, the 9th International Real-Time Scheduling Open Problems Seminar (RTSOPS 2018), Barcelona, Spain, Jul. 2018.
- Yuhei Suzuki, Takuya Azumi, Shinpei Kato, and Nobuhiko Nishio, “Real-Time ROS Extension on Transparent CPU/GPU Coordination Mechanism,” In Proceedings of the 21st IEEE International Symposium on Real-time Computing (ISORC 2018), Singapore, May 2018.
- Shinpei Kato, Shota Tokunaga, Yuya Maruyama, Seiya Maeda, Manato Hirabayashi, Yuki Kitsukawa, Abraham Monrroy, Tomohito Ando, Yusuke Fujii, and Takuya Azumi,“Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems,” In Proceedings of the 9th ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS2018), Porto (aka Oporto), Portugal, Apr. 2018.
- Daisuke Fukutomi, Yuki Iida, Takuya Azumi, Shinpei Kato, and Nobuhiko Nishio, “GPUhd: Augmenting YARN with GPU Resource Management,” In Proceedings of the International Conference on High Performance Computing in Asia-Pacific Region (HPC Asia 2018), Tokyo Japan, Jan. 2018.
- Yuya Maruyama, Shinpei Kato and Takuya Azumi,“Exploring Scalable Data Allocation and Parallel Computing on NoC-based Embedded Many Cores,” In Proceedings of the 35th IEEE International Conference on Computer Design (ICCD2017), Massachusetts, USA, Nov. 2017.
- Shota Tokunaga and Takuya Azumi, “Co-Simulation Framework for Autonomous Driving Systems with MATLAB/Simulink”, Demo Session of 23rd IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS2017), Pittsburgh, PA, USA, Apr. 2017.
- Yuhei Suzuki, Takuya Azumi, Nobuhiko Nishio and Shinpei Kato, “HLBS: Heterogeneous Laxity-Based Scheduling Algorithm for DAG-based Real-Time Computing,” In Proceedings of the 4th IEEE International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA 2016), pp. 82-88, Nagoya, Japan October 2016.
- Yukihiro Saito, Takuya Azumi, Shinpei Kato, and Nobuhiko Nishio, “Priority and Synchronization Support for ROS,” In Proceedings of the 4th IEEE International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA 2016), pp. 77-81, Nagoya, Japan October 2016.
- Yuya Maruyama, Shinpei Kato, Takuya Azumi, “Exploring the Performance of ROS2,” In Proceedings of the ACM SIGBED International Conference on Embedded Software (EMSOFT2016), pp. 2.3, Pittsburgh, PA, USA October 2016.
- Shunsuke Hori, Takuya Azumi, “Extended Mapping Algorithm Based on Modularity from Synchronous Block Diagrams to AUTOSAR Runnables,” In Proceedings of the 21st IEEE Internatioal Conference on Emerging Technologies and Factory Automation (ETFA 2016), Berlin, Germany September 2016.
- Yuya Maruyama, Shinpei Kato, and Takuya Azumi, “Preliminary Evaluation for ROS2,” WiP session of the ACM/IEEE 6th International Conference on Cyber-Physical Systems (ICCPS2016), Vienna, Austria, Apr. 2016.
- Jaeyong Rho, Takuya Azumi, Hiroshi Oyama, Kenya Sato and Nobuhiko Nishio, “Distributed Processing for Automotive Data Stream Management System on Mixed Single- and Multi-core Processors,” In Proceedings of 8th International Workshop on Compositional Theory and Technology for Real-Time Embedded Systems (CRTS 2015), Dec. 2015.
- Yuhei Suzuki,Yusuke Fujii, Takuya Azumi, Nobuhiko Nishio, and Shinpei Kato, “CPU/GPU Collaborated Resource Management for Real-Time GPGPU Applications,” WiP session of the 2nd IEEE International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA 2015), Hong Kong, China, Aug. 2015.
- Takashi Shigekuni, Toshimitsu Ushio, and Takuya Azumi, “Cloud-Assisted Sensing and Supervision of Multiple Unmanned Aerial Vehicles by a Single Operator,” WiP session of the ACM/IEEE 6th International Conference on Cyber-Physical Systems (ICCPS2015), 2015.
- Yuki Iida, Manato Hirabayashi, Takuya Azumi, Nobuhiko Nishio, and Shinpei KatoConnected Smartphones and High-Performance Servers for Remote Object Detection”, Proceedings of the 2nd IEEE International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA 2014), 2014.
- Anh Nguyen, Yusuke Fujii, Yuki Iida, Takuya Azumi, Nobuhiko Nishio, and Shinpei Kato, “Reducing Data Copies between GPUs and NICs,” Proceedings of the 2nd IEEE International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA 2014), 2014.
- Yusuke Fujii, Takuya Azumi, Nobuhiko Nishio, Shinpei Kato, and Masato Edahiro, “Data Transfer Matters for GPU Computing,” The 19th IEEE International Conference on Parallel and Distributed Systems (ICPADS), Seoul, Korea, Dec. 2013 (**Best Paper Award**).
- Yusuke Satonaka, Takumi Kitazawa, Kazuki Suzuki, Yuki Fujuzaki, Takuya Azumi, and Nobuhiko Nishio. “Lifelog-Based Active Movement Assistant System,” 1st IEEE International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA 2013), Taipei, Taiwan, Aug, 2013.
- Yuki Iida, Yusuke Fujii, Takuya Azumi, Nobuhiko Nishio, Shinpei Kato, Tsuyoshi Hamada, Satoshi Kagami, Nobuo Kawaguchi, and Kazuya Takeda, “Prototyping Commodity ICT for Mobility CPS,” WiP session of the 1st IEEE International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA 2013), Taipei, Taiwan Aug, 2013.
- Yusuke Fujii, Takuya Azumi, Nobuhiko Nishio, and Shinpei Kato, “Exploring Microcontrollers in GPUs,” the 4th Asia-Pacific Workshop on Systems (APSYS 2013), Singapore, Jul. 2013.