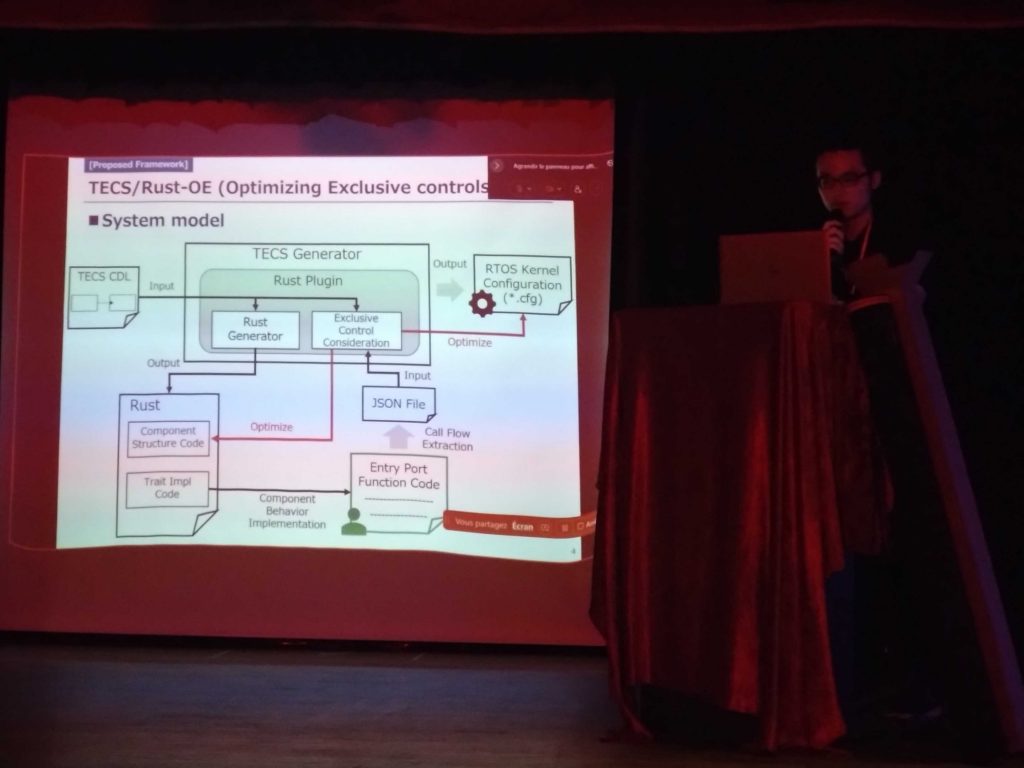
M2の吉村君が28th IEEE International Symposium On Real-Time Distributed (ISORC) 2025で発表を行いました。
学会は2025/05/26にフランス/トゥールーズで開催されました。
発表タイトルは以下の通りです。
Nao Yoshimura, Hiroshi Oyama, and Takuya Azumi, “TECSRust-OE: Optimizing Exclusive Control in Rust-based Component Systems for Embedded Devices,” In Proceedings of the 28th IEEE International Symposium On Real-Time Distributed Computing (ISORC 2025), France, Toulouse, 26 May, 2025.