M1の三浦さんと本多さんがポスター発表を行いました。
- MATLAB/Simulink Benchmark Suite for ROS-based Self-driving Software Platform
三浦啓太(埼玉大学)、徳永翔太(大阪大学)、安積卓也(埼玉大学) - モデルベース開発におけるメニーコアを対象とした性能見積もり
本多健太郎、安積卓也(埼玉大学)

三浦さん発表の様子その1 
本多さん発表の様子その1
詳細は以下より
Continue reading
M1の三浦さんと本多さんがポスター発表を行いました。
詳細は以下より
Continue reading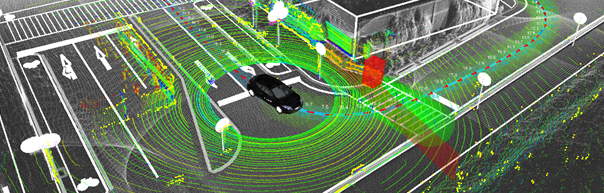
 安積先生がティアフォーのGeoffrey Biggs様と共同で「自動運転プラットフォームの実用化:ROS2で高信頼ソフトウェアの実装」
安積先生がティアフォーのGeoffrey Biggs様と共同で「自動運転プラットフォームの実用化:ROS2で高信頼ソフトウェアの実装」
という内容のSWEST21で講演されました。





今回は、大学の近くのボウリング場でボウリングです。
運動不足を解消できそうですね。
スコアは安積先生が一番でした!(20年ぶりくらいみたいなこと言ってたのに普通に強い)
写真右上にあるように一位の人には景品で1000円ガチャを回せる権利が贈られましたが、お札を入れた瞬間固まってしまい、店員さんを呼ぶことになりました。笑

M1本多君がMECO2019で発表してきました。
MECOは組込みシステム系の学会です。
開催期間は2019/6/11~14で、モンテネグロのリゾート地であるブドヴァで開催されました。

発表内容は「モデルベース開発における メニーコアを対象とした性能見積もり」です。
発表のタイトルは以下のようになっております。
Kentaro Honda and Takuya Azumi, “Performance Estimation for Many-core Processor in Model-Based Development,” In Proceedings of The 8th Mediterranean Conference on Embedded Computing (MECO2019), Budva, Monteneguro, June, 2019
研究室で月に1回くらいで行われるイベントにて、今回は研究室内で鍋を堪能しました。
2種類の鍋を楽しんだ後は学生でスマブラをしました。M1の人たち強い!





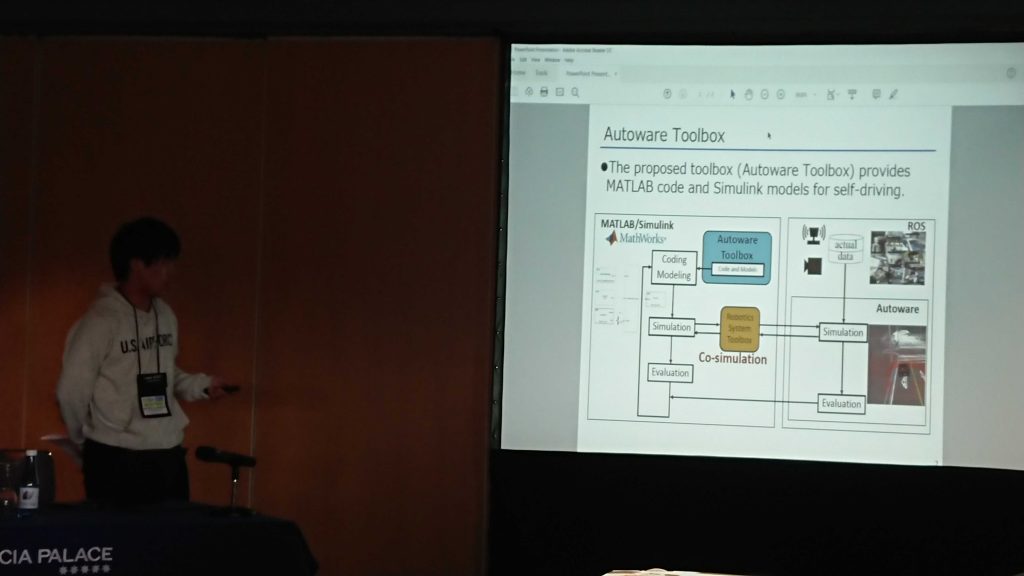
安積先生がネクスティエレクトロニクスの太田様と共同で自動運転向けソフトウェアのAutoware ToolBoxをMATLAB EXPO 2019で講演されました。
4月のプレスリリースの内容ということもあり、事前申し込みで満席になりました。多数のご来場ありがとうございました。
https://www.matlabexpo.com/jp/2019/abstracts.html?expand=trackd&#sessiond3



M1三浦君がIEEE ISORCで発表してきました。
学会は2019/5/7にスペインのバレンシアで開催されました。
発表内容は「ROSに基づいた自動運転システムのためのMATLAB/Simulinkベンチマーク」です。
発表のタイトルは以下のようになっております。
Shota Tokunaga, Noriyuki Ota, Yoshiharu Tange, Keita Miura, and Takuya Azumi.
MATLAB/Simulink Benchmark Suite for ROS-based Self-driving System
安積研究室は、自動運転基本ソフトウェアAutowareと連携できるモデルベース開発ツールMATLAB®/Simulink®のRobot Operating System(以下、ROS)ノードの開発をと豊田通商グループの株式会社ネクスティ エレクトロニクスと共同で開始し、ソフトウェア開発プラットフォームのGitHubでオープンソースソフトウェアとして公開しました。
https://github.com/CPFL/Autoware_Toolbox
埼玉大学プレスリリース
http://www.saitama-u.ac.jp/topics_archives/2019-0410-1758-19.html
日本経済新聞
https://www.nikkei.com/article/DGXLRSP507805_W9A410C1000000/
M1三浦君と研究員前田さんがICCPSとRTAS(CPS-Week2019)で発表しました。
学会は2019/4/16にカナダのモントリオールで開催されました。

発表のタイトルは以下のようになっています。
ICCPS
Shota Tokunaga, Noriyuki Ota, Yoshiharu Tange, Keita Miura, and Takuya Azumi.
Demo: MATLAB/Simulink Benchmark Suite for ROS-based Self-driving System
RTAS
Seiya Maeda, Yuya Maruyama, and Takuya Azumi.
Static Program Placement Platform for Embedded Multi-Core Multi-Cluster Systems.
安積先生が委託先代表(埼玉大学)として申請していたNEDO「⾼効率・⾼速処理を可能とするAI チップ・次世代コンピューティングの技術開発」事業に採択されました。
完全自動運転に向けたシステムオンチップとソフトウェアプラットフォームの研究開発
NEDOの公募事業に採択 完全自動運転に特化した研究開発:https://jidounten-lab.com/w_axell-nedo
安積研究室では、完全自動運転に向けたミドルウェアの研究開発を担当しています。