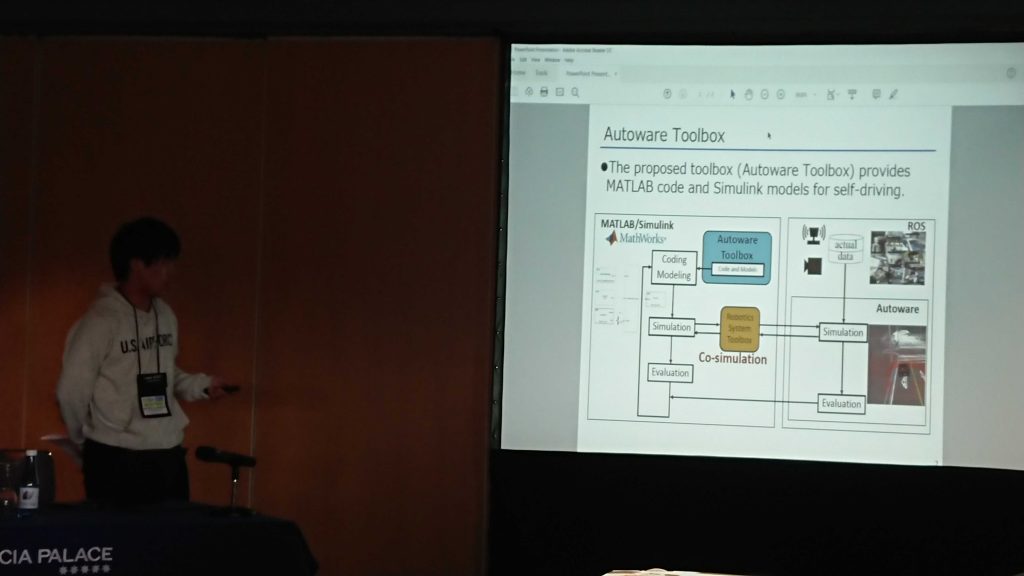
安積先生が、自動運転関係のワークショップAutonomous Systems Design (ASD 2019) で発表しました。
併設学会では立命館大学の福富君(安積先生指導学生)が発表しました。
学会は2019/3/29にイタリアのフィレンツェで開催され発表をしました。
発表のタイトル等については以下のようになっています。
Shota Tokunaga, Yuki Horita, Yasuhiro Oda and Takuya Azumi, “IDF-Autoware: Integrated Development Framework for ROS-based Self-driving Systems Using MATLAB/Simulink,” In Proceedings of the Workshop of Autonomous Systems Design (ASD2019), Florence, Italy, Mar. 2019.
Daisuke Fukutomi, Takuya Azumi, Shinpei Kato, and Nobuhiko Nishio, “Resource Manager for Scalable Performance in ROS Distributed Environments,” Design, Automation and Test in Europe (DATE 2019), Florence, Italy, Mar. 2019.