
今回の研究室イベントは運動不足解消シリーズです。
大学構内のテニスコートで1時間だけフットサルをやりました。
1時間でも皆汗だくになったので、運動不足解消できるいい機会でした。

今回の研究室イベントは運動不足解消シリーズです。
大学構内のテニスコートで1時間だけフットサルをやりました。
1時間でも皆汗だくになったので、運動不足解消できるいい機会でした。
自動運転の国際団体Autoware Foundationに安積先生のコメントが記載されました。
https://www.autoware.org/post/8-new-members-joined-the-autoware-foundation

M1 五十嵐君が IEEE/ACM DS-RT 2019で発表された論文「Multi-rate DAG Scheduling Considering Communication Contention for NoC-based Embedded Many-core Processor」でBest Paper Runner-up Awardを受賞しました。


M1の五十嵐君が IEEE/ACM DS-RT 2019 に参加し論文発表を行ってきました。
学会は、2019/10/07 ~ 2019/10/09にイタリアのコゼンツァにて開催されました。
発表内容は「メニーコアプロセッサにおける通信競合を考慮した
マルチレートDAGスケジューリング」です。

発表タイトルは以下のようになっております。
Shingo Igarashi, Yuto Kitagawa, Tasuku Ishigooka, Tatsuya Horiguchi and Takuya Azumi
“Multi-rate DAG Scheduling Considering Communication Contention for NoC-based Embedded Many-core Processor”
新しいM1の方(秋入学)と研究員の方が1名ずつ安積研究室に加わりました!
今回の研究室イベントは歓迎会です。つくねハンバーグが出てくる居酒屋に行きました。肉汁がすごかったです!





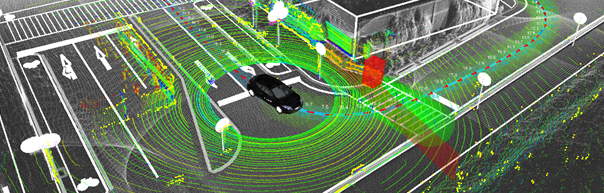
安積研究室は、自動運転技術の業界標準を目指す国際業界団体「The Autoware Foundation」の「ACADEMIC & NON-PROFIT MEMBERS」へのメンバー参加が承認されました。
これまでの自動運転に関する研究成果を公開することにより、Autowareの実用化に向けた研究開発に貢献します。
埼玉大学プレスリリース
http://www.saitama-u.ac.jp/topics_archives/2019-0927-1622-9.html
Autoware Foundation
https://www.autoware.org/
安積先生がESS2019で発表された論文「Autoware on Many-core Platform: NoCベース組込みメニーコアプロセッサ向け自動運転プラットフォーム」で優秀論文賞を受賞しました。

M1の三浦さんと本多さんがポスター発表を行いました。

詳細は以下より
Continue reading

